六自由度转台运动控制系统 时间:2025-2-16
该控制系统用于2023所管课题“强阵风飞翼布局无人机低空飞行稳定性试验研究”(80000800022021772330)。系统通过风洞虚拟飞行试验技术对飞翼布局飞行器的强阵风环境飞行稳定性进行研究。涉及飞行器控制率设计与仿真等工作内容。
该六自由度转台除必要的硬件平台外也包含了内置的驱动控制器与官方控制软件系统,该软件系统留出了各种运动控制协议接口,为上位机定制化开发提供了必要的保障。本次主要目的是进行该六自由度转台的上位机开发,功能包括天平数据采集、动力学方程解算、转台运动控制以及滚转电机联动,其中核心是动力学方程解算与转台运动控制。使用上可满足飞行器连续轨迹模拟或步进式运动控制,其运动控制信号由天平数据与动力学方程给出。同时将风洞天平测力信号进行动力学解算给出相应的六自由度位移量。该控制系统主要由Labview编写,涉及到与下位机通信、Matlab动力学方程模块组件调用、六自由度机构控制以及滚转电机控制等。

控制系统的主要功能:
本控制系统实现的核心功能是编写Labview上位机来控制六自由度并联机构,其中六自由度机构包含控制器与驱动器并且具备完整的通信协议。具体的Labview上位机应包括常规点动、轨迹追踪、天平联动、急停、回零以及其他必要功能,如下图所示。其中常规点动与轨迹追踪相对好理解,如下图红字中所给出的描述。
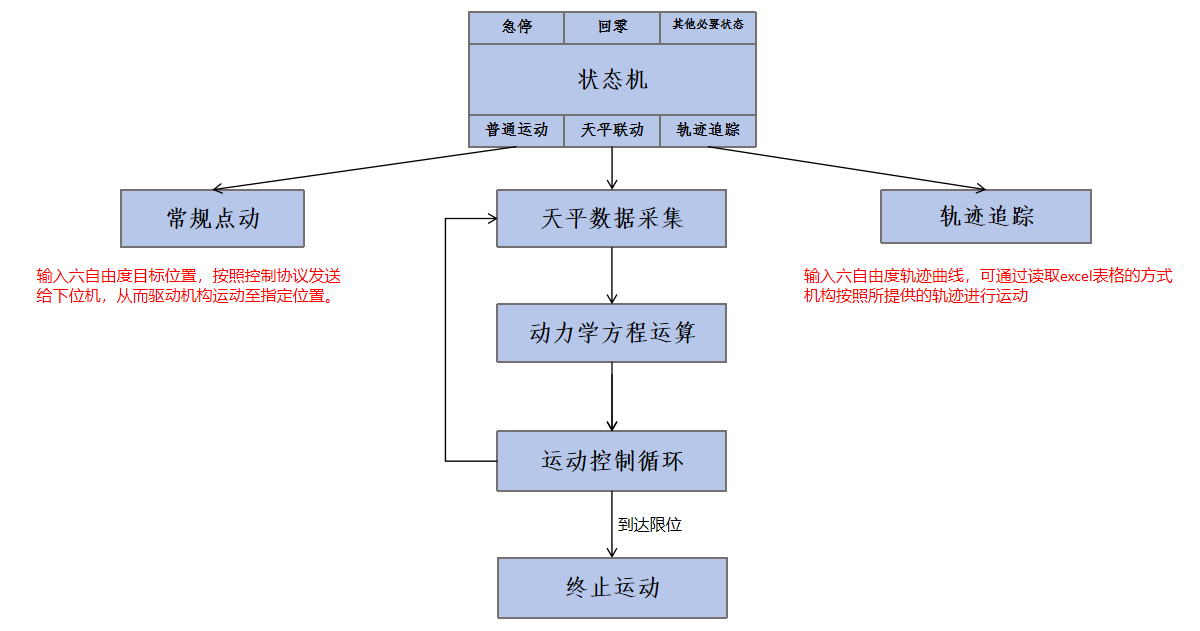
天平联动相对复杂,首先通过NI采集卡采集天平(测力传感器)的六路模拟量信号,如1000Hz采集1s后取平均得到六个分量的电信号,之后将六个信号给到运动学方程模块,该模块可理解为对上述六个电信号进行数据处理,此模块处理后的结果是将六个电信号数据转换为六自由度平台的运动输入(如将六个电信号2mv、1mv、2.1mv、0.5mv、0.7mv、1.8mv解算为六自由度机构升降10mm、横移5mm、前后3mm、滚转1°、偏航0.4°、俯仰2°)。具体的解算方法由我方提供的动态链接库实现。之后,运动控制模块接收到该六路运动指令后以特定的通信协议发送给下位机(并联六自由度机构),从而机构开始运动至下一个位置。当机构运动到位后进入下一个循环,即重新开始天平信号采集至机构运动的流程。以上循环实现的效果就是天平测力之后运动,再测力再运动直至运动到限位位置或按急停按钮。
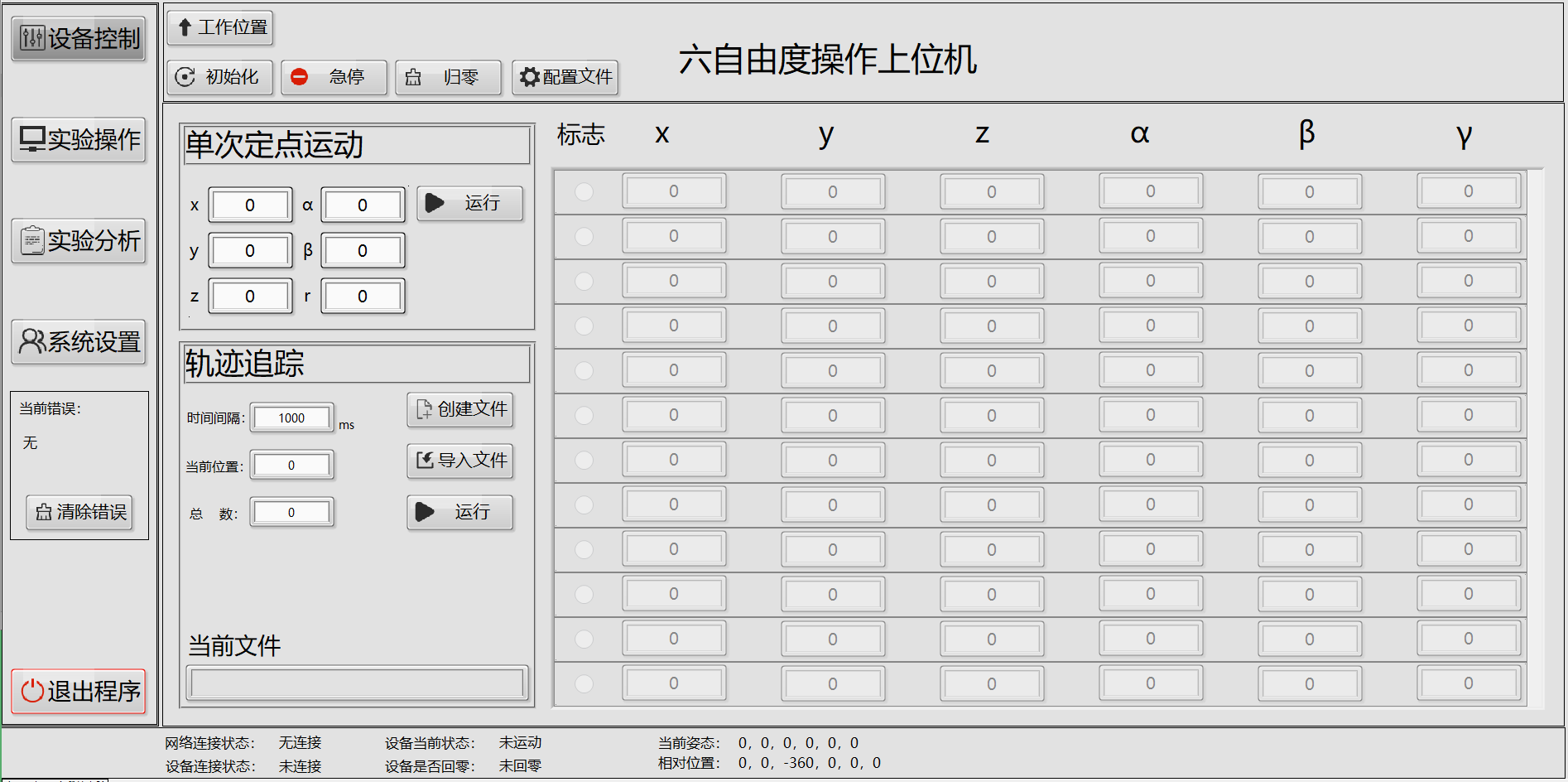
六自由度转台运动控制系统界面展示