漂浮式风机耦合仿真软件 时间:2025-2-2
漂浮式风机耦合仿真软件主要围绕国家重点研发计划“15兆瓦级海上风电机组关键技术与装备”项目课题五“大功率海上风电机组装配工艺、运输安装及测试验证技术”——漂浮式风机耦合仿真问题进行软件开发,能够实现漂浮式风机气动-水动一体化耦合仿真的高精度计算。
此软件针对漂浮式风机气动-水动一体化仿真的特点,从气动模块、水动模块、结构响应模块、系泊系统模块等进行开发和验证。通过制作特定功能的软件界面,实现基于CFD构架下,前处理的模型导入和网格划分功能,能够进行满足一体化的漂浮式风机的气动-水动耦合计算,最后能够实现给定变量的输出和后处理显示。
软件的主要功能:
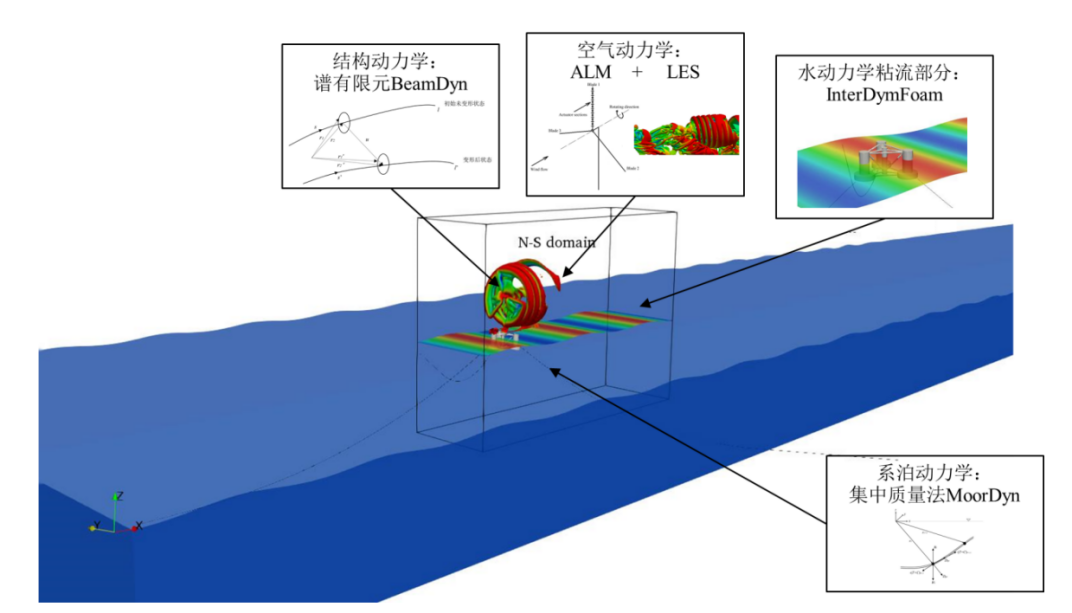
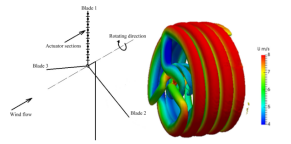
1.气动致动线模块本软件扩展基于开源软件OpenFOAM的CFD程序。软件基于非结构网格的N-S方程求解方法,可以分析浮式风机系统的复杂气液两相流,包含破碎和砰击等复杂波物相互作用。在叶片的气动载荷计算中,采用致动线模型(ALM)高效计算。该模型假设实际风机叶片被一条由叶片气动力作用点所连成的线所代替(如下图所示),流场则与CFD方法一样直接求解N-S方程,这样省却了叶片表面边界层网格和滑移网格,减少叶片附近网格数,大幅度提高计算效率。
 2.水动模块
2.水动模块
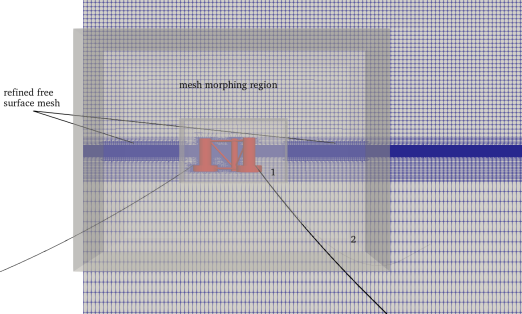
在粘性N-S求解器中,使用VOF(volume of fluid)方法捕捉自由液面,物体的六自由度运动使用OpenFOAM自带的受力计算函数force()确定浮式平台的受力及力矩,再读取锚泊系统提供的锚链约束力以及气动模型致动线方法得到的风机叶片与塔架的气动力,最终加和得到整个系统的外力,如下图所示。使用规则波对开发的模型进行验证,还会使用聚焦波研究浮式风机系统的耦合动力响应。聚焦波的波组份主要由Pierson-Moskowitz(P-M)谱或JONSWAP 谱计算获得。
 3.锚泊系统模块
3.锚泊系统模块
在平台水动力计算中,锚泊系统也是影响系统六自由度运动的极为重要的一部分,在OpenFOAM中最为常见的系泊模型为弹簧,根据胡克定律,确定锚链两侧的固定位置与弹簧刚度就能得到锚泊系统对系统的约束力。该方法属于静态方法,无法反映出流体与锚链相互作用的动态过程。本软件采用集中质量法(Lumped Mass Mooring Model)将系泊缆离散成若干份仅有质量的点,将水动力作用在这些质量点上,通过求解各个质量点的力与力矩平衡方程得到系泊缆各个节点受力。该部分采用开源代表性的MoorDyn软件包,将质量、外力和惯性的影响集中在沿系泊缆的有限个节点上。节点之间采用无质量的弹簧连接,并且锚链的水动力载荷以及附加质量由Morison方程计算。
 4.风机-支撑平台-锚泊系统耦合系统
4.风机-支撑平台-锚泊系统耦合系统
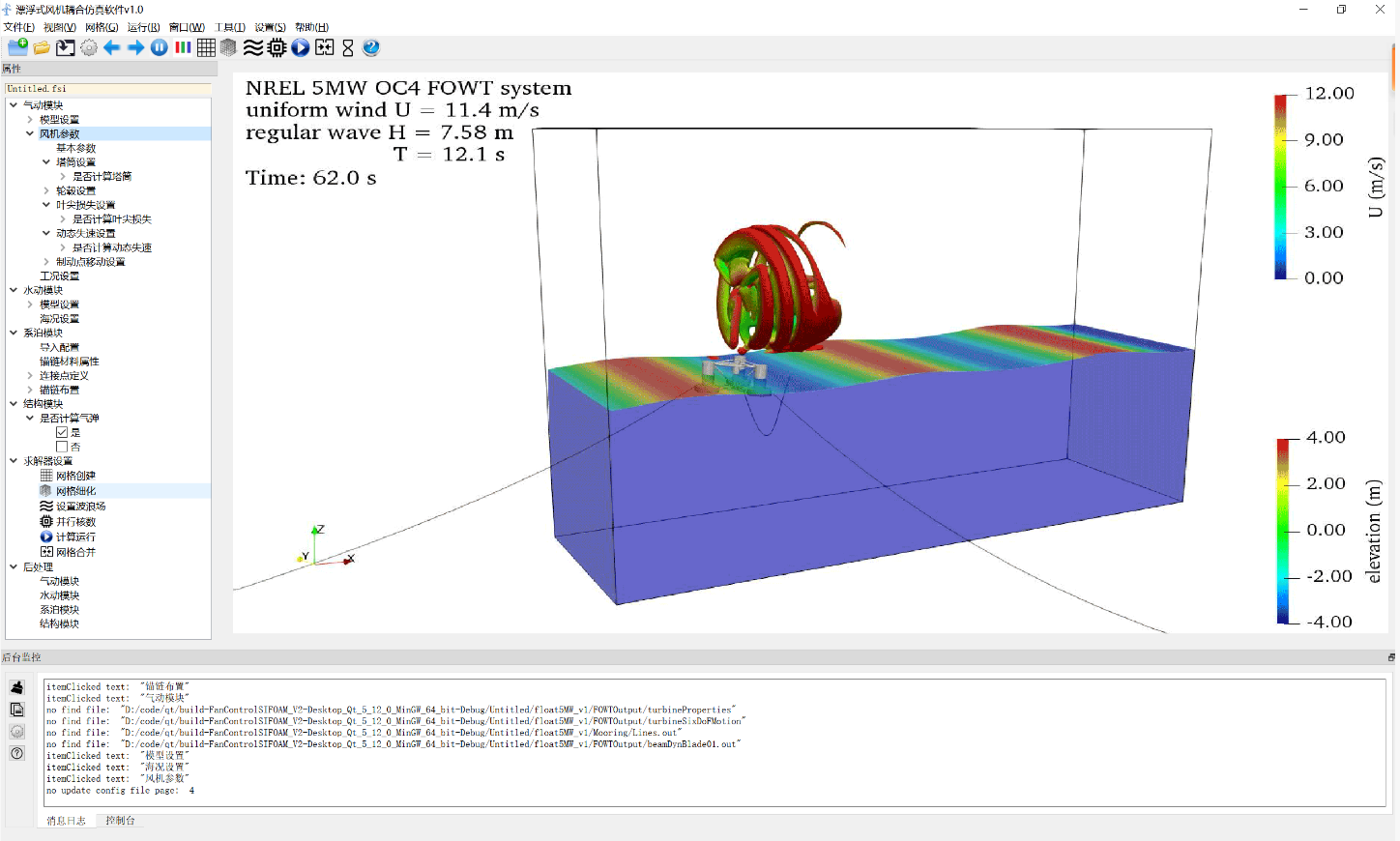
将浮式风机系统耦合模型的各个组成部分进行封装,模型中整个计算域被流体和结构两个部分,其中流体部分采用粘流区域中的OpenFOAM两相流求解器InterFoam计算水动力学,使用VOF方法捕捉自由液面,并采用牛顿第二定律计算物体的六自由度运动,实现浮式风机在波浪作用下的运动计算。粘流区域中的空气动力学部分由致动线方法计算叶片和塔架的气动载荷,并使用大涡模拟WALE(Wall-Adapting Local Eddy-viscosity)模型分析风机后方的尾流场。粘流区域中的结构动力学部分由谱有限元程序BeamDyn求解叶片的气动弹性。粘流区域中的系泊动力学部分由集中质量法程序MoorDyn计算锚链受力。粘流区域中还采用多重动网格模型处理整个浮式风机的运动。